Скачать с ютуб Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper. в хорошем качестве
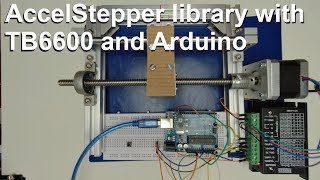
Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper.
1 год назад
arduino
arduino tutorial
arduino uno
AccelStepper
MoteursPasÀPas
DM860
DM582
ContrôleMoteur
Contrôle Moteur
GestionVitesse
Gestion Vitesse
Coding
Contrôle Précis
setAcceleration()
setMaxSpeed()
moveTo()
Fonctions d'AccelStepper Expliquées
currentPosition()
run()
stop()
DriverMoteur
Driver Moteur
Gestion Vitesse moteur pas a pas
ProgrammationArduino
#TutorielArduino
Из-за периодической блокировки нашего сайта РКН сервисами, просим воспользоваться резервным адресом:
Загрузить через dTub.ru Загрузить через ClipSaver.ruСкачать бесплатно Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper. в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper. или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper. в формате MP3:
Роботам не доступно скачивание файлов. Если вы считаете что это ошибочное сообщение - попробуйте зайти на сайт через браузер google chrome или mozilla firefox. Если сообщение не исчезает - напишите о проблеме в обратную связь. Спасибо.
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper.
Découvrez la puissance et la flexibilité de la bibliothèque AccelStepper pour Arduino dans cette vidéo explicative. Nous dévoilons un code pratique mettant en lumière les fonctions essentielles de cette bibliothèque. Vous apprendrez comment piloter efficacement des moteurs pas à pas avec divers drivers comme le DM860 ou DM582. Plongez au cœur de l'accélération, de la vitesse et de la précision des moteurs pas à pas ! Sommaire : 00:00 Introduction de la vidéo sur AccelStepper 01:34 Test du code réalisé avec AccelStepper 04:22 Explication du code et, en particulier, des fonctions de la bibliothèque AccelStepper. 09:52 Conclusion concernant la bibliothèque AccelStepper. 10:53 Fiche technique. Lien pour le code : https://www.redohm.fr/download/arduin... 📘 Introduction à AccelStepper : La bibliothèque AccelStepper pour Arduino est un outil puissant pour piloter les moteurs pas à pas. Elle offre une flexibilité accrue par rapport aux solutions de base et permet des contrôles plus sophistiqués. 🌟 Avantages : Gestion des accélérations : Permet une montée et une descente en vitesse douce, ce qui protège le moteur et les mécanismes associés. Compatibilité étendue : Convient pour de nombreux types de drivers, y compris le DM860, DM582, et tout autre driver avec une connectique similaire. Contrôle précis : Contrôle de la position avec une précision au pas près, ainsi qu'une gestion avancée de la vitesse. ❗ Inconvénients : Courbe d'apprentissage : Pour les débutants, AccelStepper peut s'avérer plus complexe que certaines bibliothèques de base. Néanmoins, elle a l'avantage de gérer automatiquement le train d'impulsions, simplifiant considérablement le code. 🔧 Fonctions d'AccelStepper Expliquées : 🔶setMaxSpeed(): Cette fonction détermine la vitesse maximale à laquelle le moteur pas à pas peut tourner. Elle est essentielle pour garantir que le moteur ne tente pas d'opérer au-delà de ses capacités ou des limites définies pour un projet spécifique. 🔶setAcceleration(): Elle permet de régler la vitesse d'accélération du moteur. En d'autres termes, cela détermine comment le moteur accélère depuis l'arrêt jusqu'à sa vitesse maximale. C'est utile pour garantir des mouvements fluides et éviter les saccades ou les surcharges. 🔶moveTo(): Cette fonction donne l'ordre au moteur de se déplacer vers une position spécifique, mesurée en pas par rapport à sa position actuelle. C'est la base du contrôle positionnel des moteurs pas à pas. 🔶currentPosition(): Comme son nom l'indique, elle renvoie la position actuelle du moteur en termes de pas. C'est essentiel pour connaître où se trouve le moteur à un moment donné. 🔶run(): C'est la fonction qui fait effectivement tourner le moteur. Elle doit être appelée répétitivement pour déplacer le moteur. Elle vérifie la position actuelle du moteur et décide si le moteur doit avancer ou reculer pour atteindre sa position cible. 🔶stop(): Elle arrête immédiatement le moteur, indépendamment de toute commande précédente. C'est utile pour les situations d'urgence ou pour simplement arrêter le moteur à la fin d'une tâche. 🎬 Principe de fonctionnement du code présenté : Ce code est conçu pour montrer comment utiliser la bibliothèque AccelStepper avec un moteur pas à pas et un driver compatible. Il commence par initialiser les différents pins et paramètres du moteur. Ensuite, dans la boucle principale, il lit la valeur d'un potentiomètre pour définir la vitesse du moteur, vérifie l'état des boutons de commande pour démarrer ou arrêter le moteur et allume ou éteint des LEDs en fonction de l'état du moteur et de sa phase d'accélération. Grâce à la bibliothèque AccelStepper, toutes ces tâches sont réalisées de manière fluide et efficace, démontrant la puissance de cette bibliothèque pour le contrôle des moteurs pas à pas. ---------------------------------------------------------- Notre site : https://www.redohm.fr/ Twitter : / le_robot_maya ❤️ Notre chaine Youtube Abonne-toi : REDOHM@REDOHM55 ---------------------------------------------------------- ⬇️ Téléchargement gratuit pour nos impression 3D sur: Grabcad : Cults : Thingiverse : ⬇️ Nos schematheque sur GrabCad https://grabcad.com/redohm-1 ---------------------------------------------------------- Musique pour le tuto proposée par RedOhm 🎵 Musique composée par : Louis Leca pour RedOhm
Comments