Скачать с ютуб Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control в хорошем качестве
Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control
3 года назад
Скачать бесплатно Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control в качестве 4к (2к / 1080p)
У нас вы можете посмотреть бесплатно Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control или скачать в максимальном доступном качестве, которое было загружено на ютуб. Для скачивания выберите вариант из формы ниже:
Загрузить музыку / рингтон Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса savevideohd.ru
Mobile Manipulation in Unknown Environments with Differential Inverse Kinematics Control
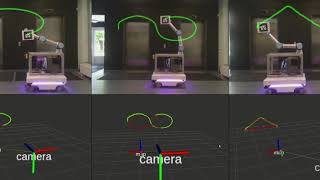
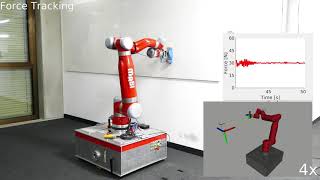
We present a differential inverse kinematics control framework for task-space trajectory tracking, force regulation, obstacle and singularity avoidance, and pushing an object toward a goal location, with limited sensing and knowledge of the environment. Presented at the Conference on Robots and Vision (CRV) 2021. Researchers: Adam Heins, Michael Jakob, and Angela P. Schoellig Paper: https://www.dynsyslab.org/wp-content/...
Comments